第5回:エンジニアド・デザイン
──一点突破から考える工学的プローチ
──一点突破から考える工学的プローチ
2. ビジビリティによる一点突破
新井──ありがとうございます。個々の建築ではなく「街」という巨視的なスケールでは、距離という指標が支配的になりますが、距離というひとつの変数から、さまざまな評価ができることを実例を通して示していただきました。
市川──建築より都市の解析のほうが難しいというイメージがありますが、一概にそうも言えません。
新井──なぜ建築のほうが難しいのでしょうか。
本間──都市よりも建築スケールのほうが、人や建物の個性が顕在化するから、というのがひとつの理由だと思います。たしかに、都市はいろいろな要素が重なってできているので、普通に考えたら解析は難しい。ですが、都市のスケールでは個々人の個性を気にしなくてよい、という利点があります。一人ひとりの個性的な動きを予測することは難しいですが、それが何万人も集まると、個々人の価値観と行動のバラツキを統計的に扱えるようになります。すると、例えば万有引力の法則のような単純なモデルで集団の動きを予測できます。建物についても、先ほどから施設や店舗を「点」で表しているように、その個性を無視しても分析精度はさほど悪くなりません。
これに対し、建築のスケールで考えると、建物は固有ですし、利用者も限定的なケースが多い。すると人や建物の個性が分析上重要なファクターになります。そのため、「人によって違う」「建物によって違う」という以上の結論を得ることが難しくなるのでしょう。
このように、いわゆる「計画」分野では、都市とは異なり建築は数理的手法とマッチングが悪い、と言えそうです。一方で、建築スケールであっても、「構造」と「環境」の分野では研究上も実務上も数理モデルに基づいた手法が主役です。ではその違いはどこからくるのでしょうか。その検討からはじめて、「数理モデルを用いた建築計画」の将来について考えてみたいと思います。
まず、あくまで試論ですが、「計画」「構造」「環境」のポジションを描いてみました[fig.2-1]。左の列に、アメリカの論理学者パースによる「科学の分類」を配置しています。一番下が具体的な個別の知識で、上にいくほど抽象的で一般的な科学になります。一番上が「数学的理論」です。さらにその上に、構成の学として「設計学」を置いています。これは工学者の吉川弘之先生の考え方を引用しています。もうひとつ参照したのが、「根拠に基づく医療」(Evidence-Based Medicine : EBM)です。これは、私が委員になっている建築学会のEvidence-Based Design 小委員会でも参考にしている考え方です。ここでいうエビデンスにはしっかりとした序列があります。図で上にいくほどエビデンスのレベルが高くなります。この分類に建築の計画、構造、環境を対応させてみました。
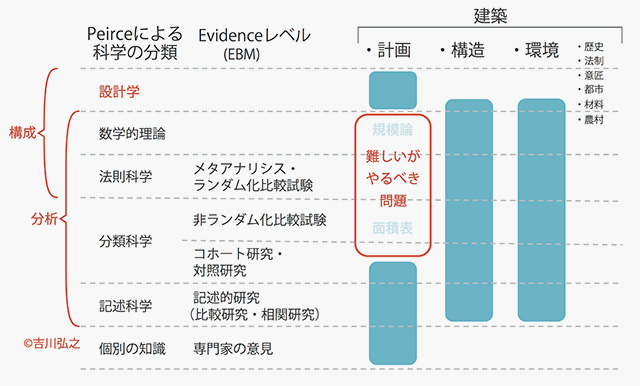
- fig.2-1──「計画・設計」のボジション(試論)[画像をクリックして拡大]
計画のなかに意匠も含めたうえで、実務での設計者数や設計料から考えると、3分野のなかで計画分野がもっとも存在感があるはずです。でも、学術の領域では構造が強い。構造が強い理由は、おそらく「法則科学」や「数学的理論」がきちんと整っているからだと思うんですね。環境も同様です。これに対して、計画分野では「法則科学」や「数学的理論」が手薄です。抽象的な議論になかなか発展しない。けれども、その上の「設計学」につなげるためにも、この手薄なところをきちんと研究・実践していくべきだと思います。
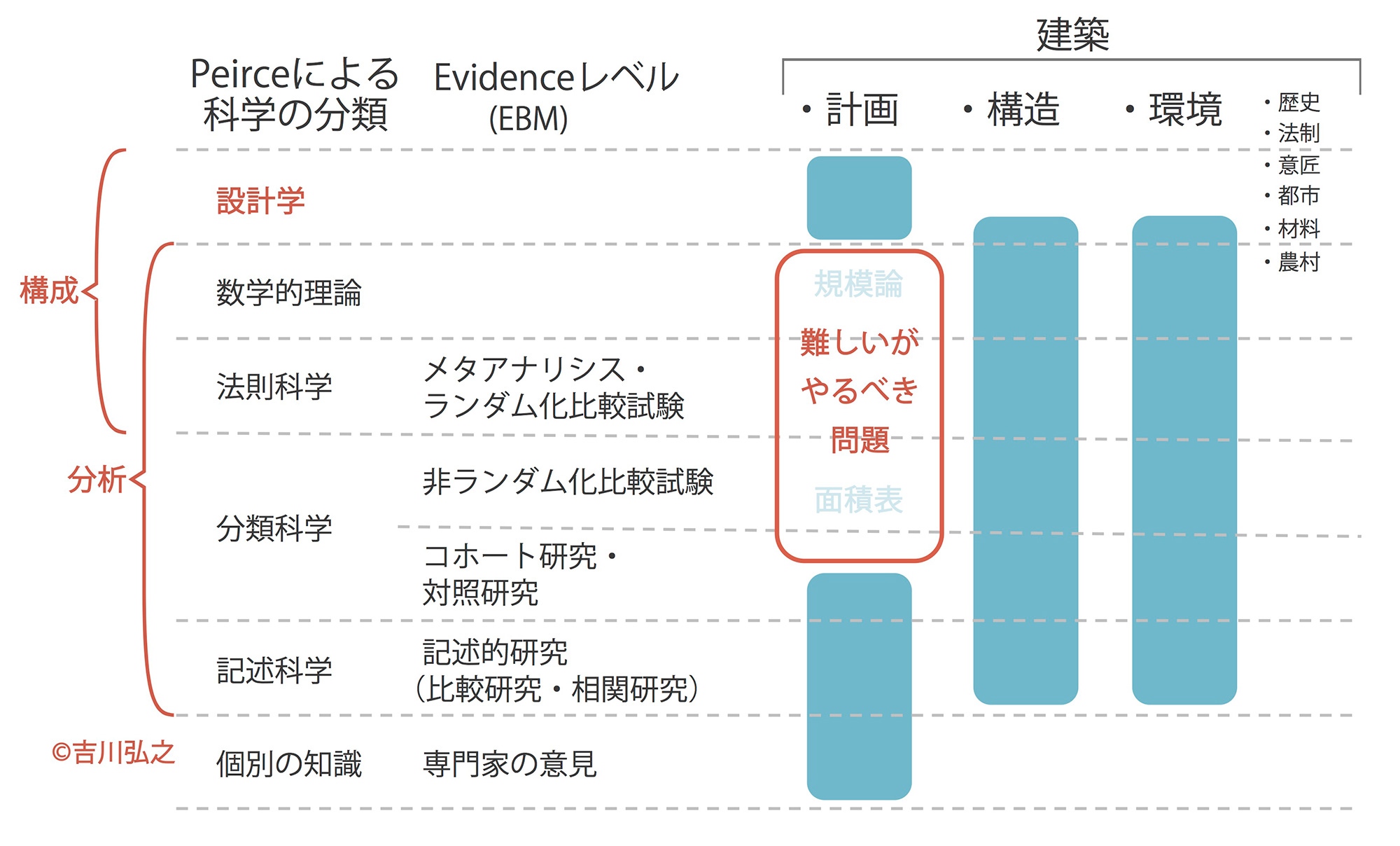
なぜ、計画と意匠より、構造と環境のほうが、数理的・抽象的・科学的なのか。その理由を、今日のテーマである「目的関数」の観点から考えてみましょう[fig.2-2]。これも試論です。そのいちばんの理由は、構造と環境のほうが目的関数を設定しやすいから、だと思っています。というのも、構造分野では、「耐震強度」(安全性)や「部材量」(経済性)を目的関数とすることに、反論は少ないでしょう。また環境分野では、熱的あるいは光的な「快適性」を目的関数にしてよさそうです。するとモノやエネルギーの話になるので、再現性のある抽象的な議論ができる。これが理由で、構造と環境では数理的研究が発展してきたと思います。
- fig.2-2──科学的な空間デザイン=未開拓分野
これに対して、計画分野における目的関数は、定めるのが難しい。なぜなら、「動線のスムースさ」や「フレキシビリティ」果ては「美しさ」に至るまで、考えなきゃいけない機能がたくさんあるからです。だから目的関数に算出するときに、お互いに相反する機能をどのような重みで合算すべきかがわからない。そもそも数値化できない機能が多い。定義すら難しい機能もあります。このように、みんなが同意する目的関数を設定できないので、その後の抽象的な論展開が難しいのです☆12。
☆12──[豊田]最近は「建築設計の領域にAIを導入したい」というざっくりとした問いの難しさによく直面するが、まさに意匠・計画という領域と構造・設備という領域との構造的な違いを感じる。指標を共有しようがない。[石澤]良い建築を記述する、ということの不足がこういうことの解決につながらないかな、と最近思っている。指標がどれだけ散らかっていても、テキストなど記述されたものがあれば処理して何かを抽出できる。やりたいことを裏付けるだけのアウトプットの蓄積が足りていない、というような感覚を持っている。[池田]もう一歩踏み込んで言うと、事前に評価の対象として認識されていなかった新たな価値が発見された時に、フレームが変わり議論は大きく展開する。しかし、その可能性をこの構造のなかに包含させるのは難しい。
でも、こんな難しいことを考えないで、僕らは日常的に設計していますよね。実務的には、もちろん機能を数値化したりはしません。機能の集合を包括的に捉えて、直感的に設計します。上手い下手はありますが、機能どうしをなんとなく調停します。こういうのは人間はすごく得意です。
しかし未来の設計手法を想像すると、もっと数理的で客観的な設計判断をしている気がします。それに向かう第一段階として、まずは、数値化しやすくて、みんなが同意してくれる機能にフォーカスする。それに基づいて、一点突破型で数理的に設計する。そんな科学的な空間デザインができるんじゃないかと思います。
2.1. スクリーンをどこに配置すべきか
この一点突破型の科学的設計とはどういうものでしょうか。僕が実際に直面した事例からお話しします。「ビジビリティ」から突破する部屋の形の最適化です。
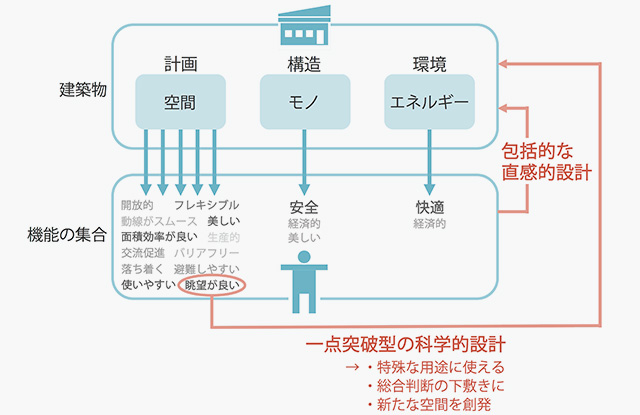
100人くらいが座れる大きさの会議室のなかで、スクリーンをどこかに配置する必要がありました[fig.2-3]。A案では、スクリーンから見て後ろの席は、スクリーンが遠くて見づらい。かたやB案では、全体的にスクリーンまで近くなるものの、前の端の席は角度が浅くてスクリーンが見づらい。結局どっちがよいのでしょうか。
- fig.2-3──スクリーンをどこに配置すべきか(2つの案)
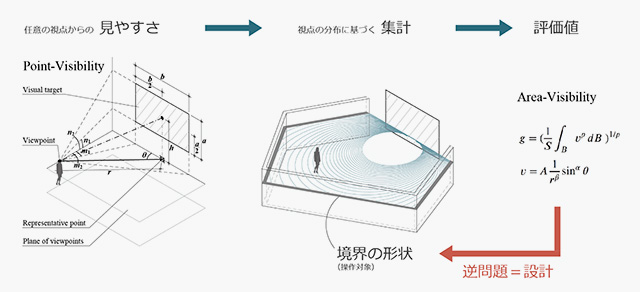
この問題を一般化して考えてみましょう☆13。順を追って定式化します[fig.2-4]。まず、任意の視点からのスクリーンの「見やすさ」を、なんらかの数式で表現する。「なんらかの数式」とは、例えばスクリーンを見込む立体角などです。その次に考えるべきは、視点の分布。例えば、100人が座ったときの目の位置がそれです。部屋の形が視点の分布を決めます。そして、これらの目の位置から計算した「見やすさ」を集計します。集計のしかたもポイントで、施設配置の例でお話しした、公平性パラメータpを組み込むこともできます。この集計された値が、部屋の評価値です。この評価値によって、A案とB案を比べられます。
☆13──[石澤]大事なのはここ! 実務的には、案が複数に絞られていて、そのなかから評価、あるいはまったくの平場から何か生成する、という発想に偏りがち。シンプルなケースから一般化するという発想は、時間が限られていてもできることなので定着してほしい。
- fig.2-4──ビジビリティを一般化して考える[画像をクリックして拡大]
もうちょっとだけ考えを進めると、じつは案を比べる以上のことができます。それは設計です。ふりかえると、見やすさを表す数式、部屋の形、パラメータpなどをインプットすると、部屋の評価値がアウトプットされました。これを順問題といいます。今度は逆に、アウトプットからインプットを推定してみましょう。すると、評価値(これは目的関数といってもよいです)を最大化する部屋の形を逆算できそうですよね。これを逆問題といいます。この観点からすると、部屋の形を決める設計は、逆問題なのです☆14。逆問題を解くのは一般に難しい。設計が難しい理由のひとつはここにあると思います。
☆14──[堀川]このフィードバックループをつくる部分に興味がある。個人的に試したなかでは、ロボット強化に使われるような強化学習のような手法が使えそうだなと感じている。
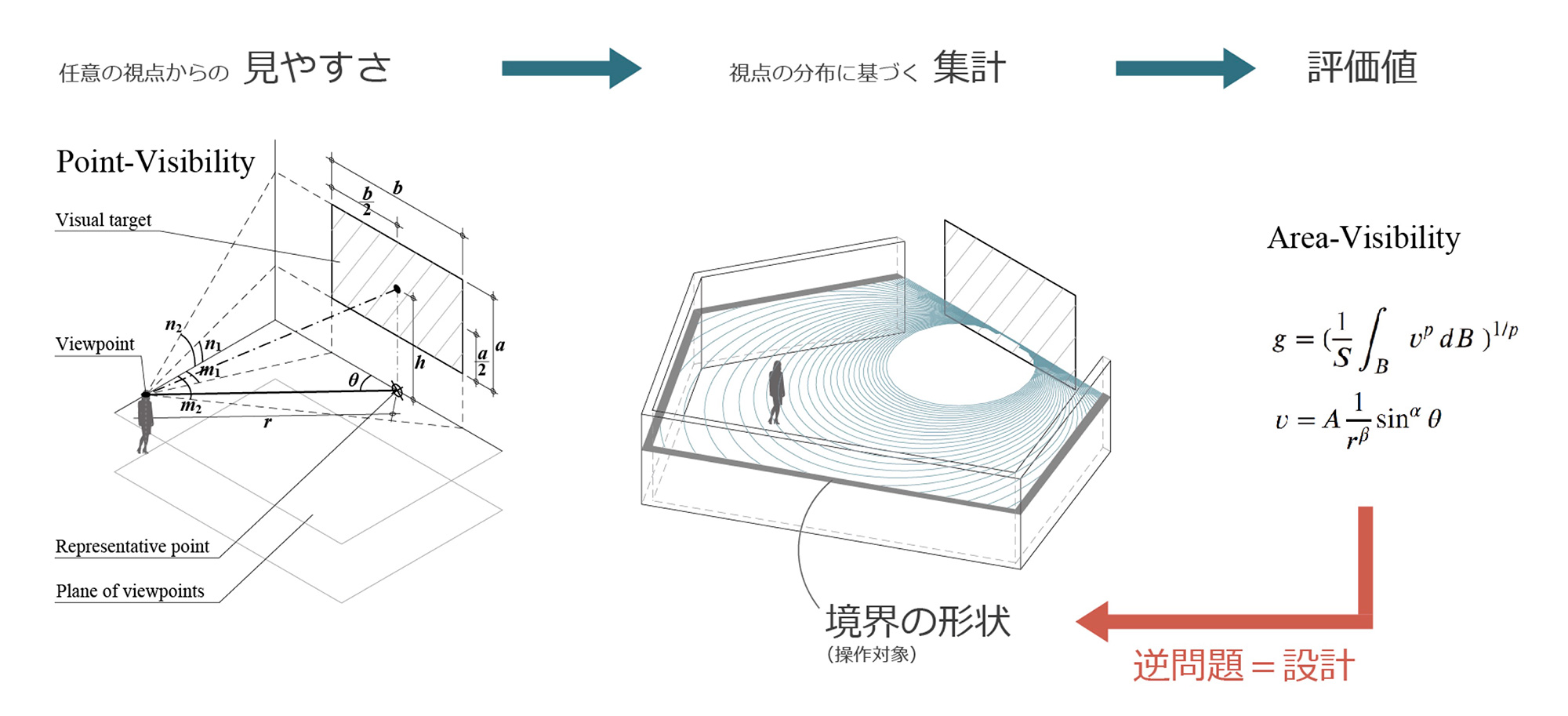
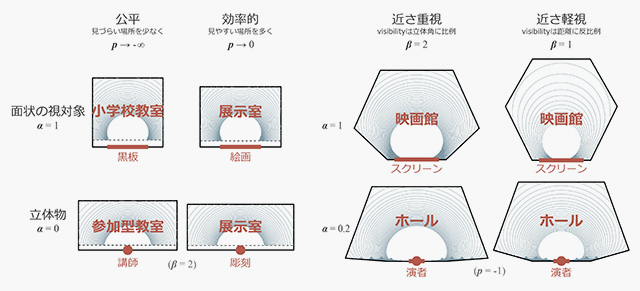
さて、逆問題を解いて、「見やすさ」という評価値を最大化するような部屋の形を実際に描いてみました[fig.2-5]。四角形の部屋と、六角形の部屋のそれぞれについて、面積を固定してそのなかで最適な形を出しています。
- fig.2-5──最適な部屋形状(ビジビリティだけを考慮したときの)[画像をクリックして拡大]
それぞれ4つの最適形態があるのは、パラメータの設定がいろいろあるからです。このようにパラメータを適切に設定することで、いろいろな用途に対応できます。例えば公平性パラメータを無限大に近づけると、黒板を見やすくさせる小学校の教室の形になる。この形は、最も見づらい席からの見やすさをできるだけ高くします。ミニマックスならぬマックスミニですね。逆に公平性パラメータをゼロに近づけると、絵画を見やすくさせる展示室の形になる。この形は、見やすい場所からの見やすさを高くします。教室にいる生徒とちがって鑑賞者は動き回れるので、そう設定しています。また公平性パラメータのほかに、視対象を斜めに見ることを嫌がる度合いを表すパラメータも、モデルに入っています。このパラメータを動かすことで、視対象を黒板から講師に、絵画から彫刻に変更できます。さらに、部屋の形が四角形でなく六角形だとすると、映画館やホールのプランに見えてきます☆15。
☆15──[豊田]こういうリバースエンジニアリング的な形態導出が今後とても面白くなると思うが、同時にそこに至るには諸々のパラメーターやそれらの関係性の抽出と、実効的な領域をカバーしていることの担保という前段階を経なければならない。そこには学問的なブルーオーシャンが広がっているので、ここをもっと掘る人が必要。
このように、「ビジビリティ(見やすさ)」に着目することで、一点突破型で数理的に設計できそうです。もちろん、設計のときに考えなきゃいけない機能は、ビジビリティ以外にもあります。例えば教室では座席配置のしやすさ、展示室では動線のスムースさ、劇場では音響のよさも、重要なプランニング要件です。なので将来的には、ほかの要件とあわせて多目的な最適化を行うべきでしょう。でも、ビジビリティを独立して数値的に評価することは、その前段の知見として役に立つと思っています。とくにパラメータに対する感度分析ができるのが大きいです。
あるいは、一点突破設計のそのほかの使い方として、「新たな空間をつくり出す」という方向がありそうです[fig.2-6]。ビジビリティ評価を空間の性能比較に使うのは、守りの姿勢といえます。それだけでなく、攻めの姿勢もあるのではないか。ビジビリティ駆動型の自動設計によって、人間が考えつかないような新たな空間をつくり出せるかもしれません。このように守りと攻めの両面できるのがいい方法だと思います☆16。
☆16──[池田]非常に示唆的。評価関数によるモデル化は評価そのものよりも、それ以前に(なかば無意識に)存在していた前提条件のフレームを破壊するためにあるという意味だと思う。
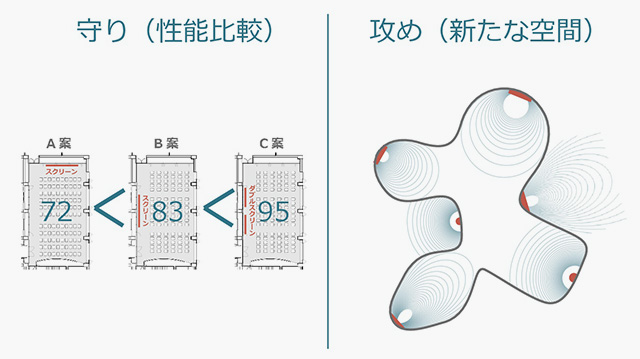
- fig.2-6──エンジニアリングの守りの姿勢と攻めの姿勢
今まで見てきたように、人間の認知や行動を定式化して、建築の形をインプットすると、なんらかの評価値が出る。こうした数理モデルをつくれます[fig.2-7]。そして、このモデルをぐるっと反転させて逆問題にすれば、設計に使うことができる。評価値をできだけ大きく(もしくは小さく)するような建築の形を見つけるわけです。さらに言うと、人間の認知と行動を表す数式には、パラメータを入れ込めます。このパラメータを動かすと、つまり認知と行動を変化させると、それに適した建築も形を変える。このようなシステムをつくることが、エンジニアド・デザインのひとつの目標だと言えるでしょう☆17。
☆17──[豊田]さらにこれがメタに、動的に扱えるようになってはじめて、多くの人がイメージしているような「AI設計」のような何かが実効性に少し近づくんだと思う。でもその道のりが遠く険しいことは、あまり共有されていない。[石澤]思考を書き下すというプロセスをどれだけ経たかで差が出そう。自分が出した結論をステップに分解できる人は少なくともこれに近いけれど、そこで考えを止めてしまって「あとはAIがやってくれる」になってしまうと絶望的。
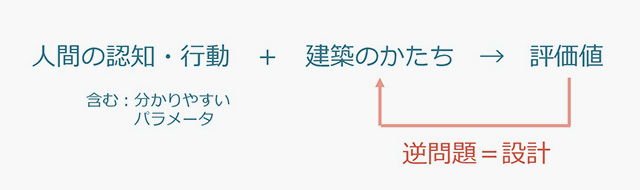
- fig.2-7──逆問題としての設計
2.2. ショールームの設計
市川──ビジビリティの例を出していただきましたが、hclab.では街路の開放度や室内での視点が通りやすさをビジビリティに通じる考え方で評価・調査しています。見える/見えないというのは、定量化しやすいんですね。原理は非常に単純です。始点から無限に伸びる線(半直線)や、始点と終点がある線(線分)があるとして、線の起点と先に何があるかを場面ごとに使い分けることで、さまざまなものを測ることができます。
今から紹介するのは、東京大学生産技術研究所の今井公太郎先生の研究室とhclab.で取り組んだ、車のショールームの形態を提案するプロジェクトです。この例を、先ほどの図式に当てはめると、線分の始点は歩行者やドライバーの視点。終点は対象となる自動車の表面の点(つまり車体)です[fig.2-8]。その視線が柱やスラブ、周辺の建物によってどれぐらい遮られるかを計測します。
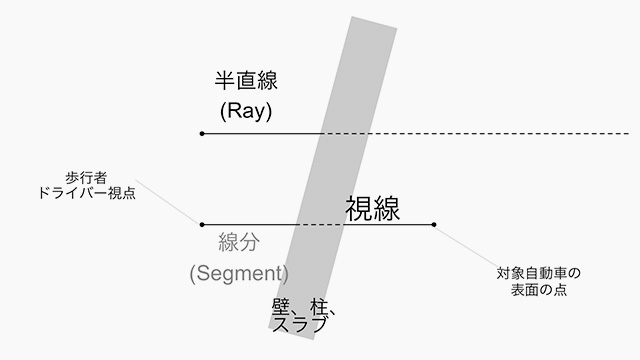
- fig.2-8──ビジビリティ(直線、半直線)の図式
ブランドのフラッグシップカーがよりよく見えるようなディスプレイ──それを私たちはフィーチャービークルディスプレイ(FVD)と呼びました──の形態をエンジニアリングしてクライアントに提供する。そんなミッションです。
まず、「車が見える」というビジビリティをどう定義するか。対象である車のモデルの表面に6,000ほどの点を打ち、それらがある視点(通りを歩く人やドライバーの視点)からどれぐらいの割合で見えるかを測定します[fig.2-9]。約6,000の線分のうち、建物やスラブによって遮られてしまう本数を数えます。もちろん、車の裏側の点は見えないので、ビジビリティが1.0になることはありません。ガラスに反射して屋内にある対象が見えなくなってしまう場合も考慮しながら、場所によるビジビリティの違いを可視率でスコアリングすることができます[fig.2-10]☆18。
☆18──[堀川]目的に応じて可視率に重み付けをすると、車自体がどう配置されるべきかという問題を解くきっかけにもなりそう。車のロゴが見えたら評価値が上がるとか。
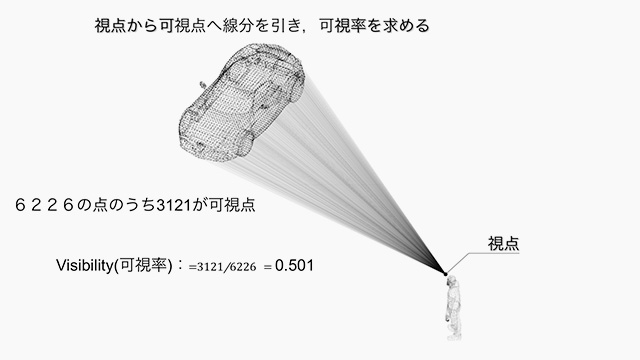
- fig.2-9──対象の車と視点のあいだに線分を引き、可視率を求める
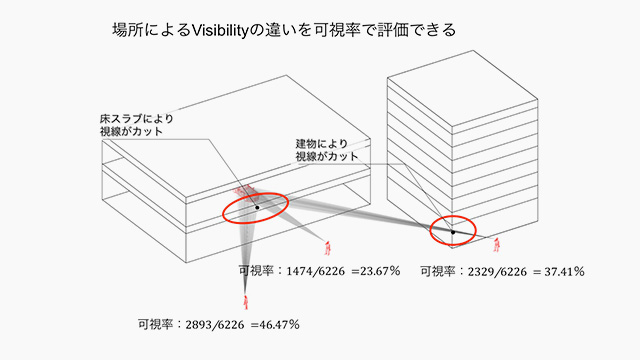
- fig.2-10──場所ごとの見え方の違いを可視率で評価する
そして、ビジビリティに影響を与えると思われる周辺の建物のモデルも含めたシミュレータを開発して、各視点のビジビリティの評価をヒートマップとして把握できるようにします[fig.2-11]。建築形態が導く効果をモニターできるということはとても重要です。必ずしも効果のピークを採用することができない場合でも、クライアントの要望を聞きながら実行可能な範囲で効果を見込める設計ができるからです。
歩行者やドライバーの視点からどう見えるのか。あるいは、1階と2階の両方が見えるのか、見えないのか。そういったことを評価して、対象となる車が一番見えるディスプレイの形をエンジニアリングして提案しました[fig.2-12]。結果だけ見ると、どうしてこのような形状なのかはわかりづらいのですが、エンジニアド・デザインというのは、まさにこうしたアプローチではないかなと思います☆19。
☆19──[豊田]ここまでのごく単層的な評価関数に絞ったなかでも、とんでもない階層の計算を動的にしないといけない。これを実空間のあらゆる関数のあいだでバランスをとりながら計算することの不可能性を考えるにつけ、実空間というこの世界の計算能力の圧倒性に畏怖の念を禁じ得ない。
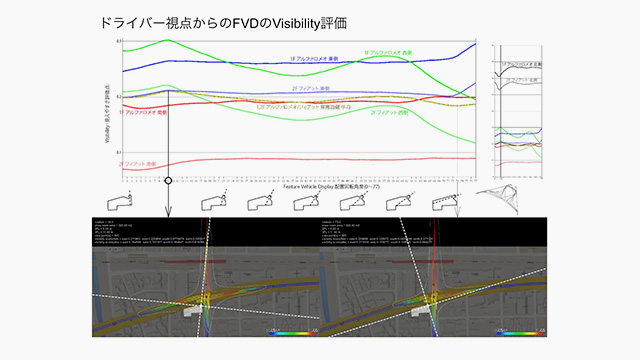
- fig.2-11──ドライバーの視点からFVDのビジビリティの評価を表したグラフ

- fig.2-12──最終的なショールームの形の提案
2.3. インスタレーションの設計
市川──もうひとつ、ビジビリティの考え方を応用したプロジェクトを紹介します。「ミラノデザインウィーク」(2018)でのレクサスのインスタレーション《LIMITLESS CO-EXISTENCE》です。与えられたテーマは「CO-」でした。collaboration、corporationやcoexistanceの接頭語「co-」を意味します。
メインのインスタレーションは、約12,000本ものストリングが天井から吊り下げられていて、中央にある白色の水平レーザーを360°照射することで、ストリングに当たった部分が光の点になって見える、という仕組みです[fig.2-13]。
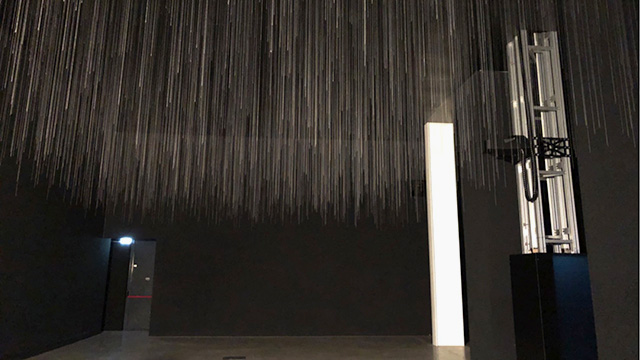
- fig.2-13──インスタレーションの内観
それぞれのストリングは1本も影となって干渉せず、すべてにレーザーの光が当たるように配置しています☆20。ストリングの配置は、先ほどのビジビリティの考え方をレーザーの光に置き換えて設計しています。図式に当てはめると、半直線の始点はレーザー光源になります[fig.2-14]。お互いのストリングに光が当たるように、厳密に接線を計算しながら、微細な角度を極座標で管理し、光源からストリングまでの距離をランダム変えています。単純にランダムにするだけでは偏りが出て中心が顕在してしまいます。そのため、ランダムネスの密度を平方根を使って調整することで、中心への偏りがなく一様にランダムかつ、すべてのストリングに光が当たるように配置しています。
☆20──[木内]さらっと言い放ってらっしゃるけど、すさまじい話。[豊田]レーザーという技術特性とアルゴリズムのアプローチとの合成デザインとして多重に上手くてぞくぞくした。[石澤]均一にバラしたい時にべき乗(あるいは対数)を取るというのは、ある程度試行錯誤した人ならきっと身につけている方法で、もう手法化して意匠設計手法として教えてしまってもいいんじゃないか。
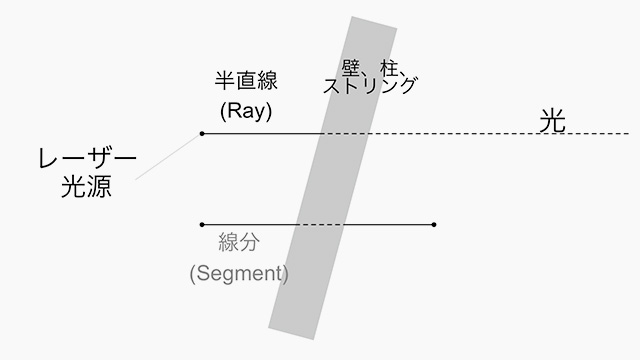
- fig.2-14──ビジビリティ(直線、半直線)の図式
立面図を見るとストリングを取り付けるパネルの目地にそって筋が見えますが、平面では筋を感じられないようなランダムの配置になっています[fig.2-15]。雑多に自由に存在していても、計算とデザインの力によってすべてが光を享受できるようになる。こうした技術やソリューションそのものがメッセージになると考え、世界に発する力強いメッセージとして、ブランドのビジョンにマッチするように、長い時間をかけてレクサスやチームと一緒につくり上げました。この場面では、エンジニアドされたデザインとして、力を発揮したと思っています。
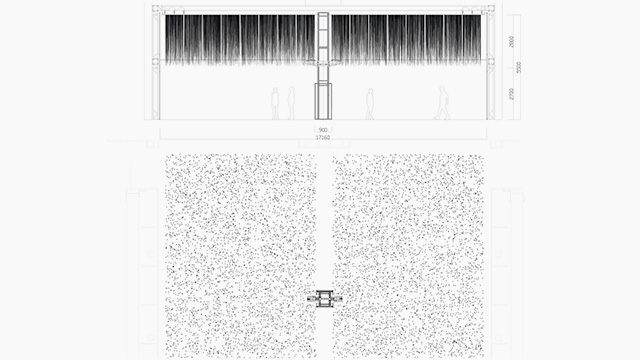
- fig.2-15──インスタレーションの立面(上)と平面(下)
新井──ありがとうございます。僕は紹介された2つのプロジェクトのどちらもご一緒させていただく機会がありました。市川さんほど工学的な方法をデザインに昇華させている人は、ほかにいないんじゃないかなと思います。わからないことがあったら徹底的に実験してモニターする。そのフェーズをとても重視しているのが印象的でした。
さて、お二人には人間がどのようにモノを見ているのかを数値化して評価する事例をご紹介いただきました。本間さんのお話のなかで一点突破型という言葉がありました。建築の複雑な問題にアプローチするために、一点突破型の考え方から、どのように目的関数の設計を行うべきなのでしょうか。
- 1. 登壇者プレゼンテーション
- 2. ビジビリティによる一点突破
- 3. 目的関数をどのように設定すべきか
- 4. 質疑応答


