第4回:コンピュテーショナルデザインの現在地
石津優子プレゼンテーション
石津優子──私はいま、建設業界のなかでコンピュテーショナルデザインをどのように実装していくかというデザイン開発研究領域にいます。学生時代は、神戸大学工学部建設学科で設計を勉強し、その後、大学院に進学しワシントン大学に留学しました。そのときに初めてデジタルファブリケーションやコンピュテーショナルデザインという分野を知りました。非常におもしろいと感じて、スイス連邦工科大学(ETH)MAS CAADを修了しました。
- 石津優子氏
学生時代につくった《3D Printing House》は、Processingを用いて形をつくり、プリンティングまでのプロジェクトでした。角田さんの「1対n」という話につながりますが、無数の形をシステムによってつくっていくことができます。《Monstro City》は、トポロジーの解析をしつつ、地形に都市を自動生成させるというプログラミングのグループ課題でした。それぞれの人がそれぞれのシステムをつくって、それらを組み合わせて都市的なものをつくっていくというもので、試しにやってみました。
マテリアルの授業では、電子工作的なことをしながら、タンジブルで、触ると少し震えたり、熱で色が変わるマテリアルと建築に取り組みました。修士制作の《Wooden Furoshiki》は自然素材をいかにデジタルに落とし込むかという課題です[fig.3]。製材加工される前の丸太をスキャニングして、グレインに沿って加工して、手作業も入れつつ、柔らかい風呂敷のような椅子をつくりました。ジョイントも自分たちで設計して、メタル加工の研究室にお願いして、ボールジョイントのようなものも自作しました。デザインしながら、自分たちでつくることを重視してやっていきました。風呂敷のように結んだりほどいたりできる柔らかい布のような木製プロダクトです。デジタルファブリケーションの授業にはロボットで試作をつくる技術も学びました☆5。
fig.3──《Wooden Furoshiki》☆5──[石澤]デジタルな検討の結果が「モノ」になる、ということへの直感的な体験ができる機会がまだ少ないですよね。デジタルでつくった形こそobject(客体)にアウトプットしてみることを、私たちがもっと習慣にしていかないと。
2014年に帰国し、堀川淳一郎さんと「Orange Jellies」というユニットを結成してフリーランスで活動していました。先端技術を活かした設計デザイン・表現の研究開発、デザイナー向けの形状デザインツール作成、デザインと建設の各専門家をつなぐソリューションの提案、地域・一般向けのワークショップ企画・開催という4つが活動の軸です。
「Parametric Volume Study」は、設計事務所さんに向けてつくったデザインシステムです。パラメータを使って、設計者がスケッチをするように、自分でかっこいいと思うものを探るためのツールです。これは評価・フィードバックは人間が行なうという事例ですね。
「Random Facade」は、大成建設による《東郷青児記念損保ジャパン日本興亜美術館》の新美術館の設計を支援したものです。設計者からは、施工条件、目地などを考慮しつつ、開口、四角をうまくランダムにつくりたいという相談がありました。5つのサイズ、個数によって密度の設定ができます。設計者が考える「良い」という曖昧なものを探ることができるツールづくりです。その後、BIMモデルに持っていって、3Dで検討する支援までを行ないました☆6。
☆6──[豊田]でも、これなんかは結局新しい道具をもらっても、使う側のその特殊な形態生成という領域に対する感性が十分醸成されてないと、結局その道具ならではの良さが活かしきれない形態が生まれて終わっちゃうというひとつの残念な例になってしまったよね。道具を使うのに必要な洗練というものはやっぱりある。
2017年夏に、慶應義塾大学SFCが主催する国際オープンワークショップ「Intensive Summer Robotic workshop」で、製材加工する前の生の自然素材である丸太を、ロボットアームを使用して直接プロダクトにする内容を試みました[fig.4]。丸太は軸を出すのがすごく難しい素材です。簡易スキャニングをして、径が異なる一つひとつの仕口の加工やカーブの計算をコンピュータにやらせました。2週間という限られた期間のワークショップだったので、アウトプット自体は限られたものですが、ここではアーキテクトの教育を受けたデザイナー自身が、ロボットなどを使いながらデザインを実装していくことを試しました。生産性の向上を目指す建設業でのロボットとは違い、人間が実際にラジコンのようにロボットを動かしていくというもので、自分の手の延長のような使い方です。あくまでデザイナーがつくりたいものを早く実装するための技術というのが特徴です☆7。
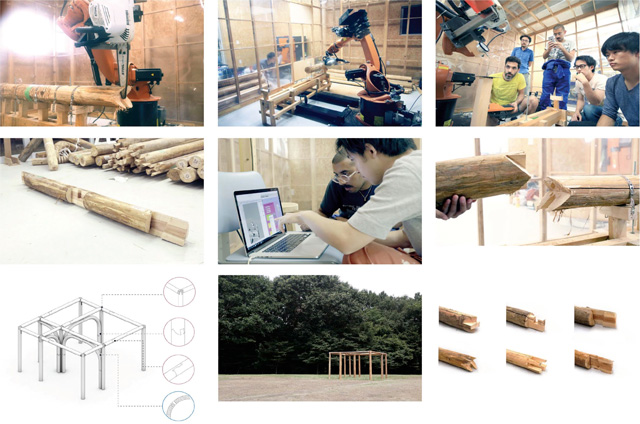
- fig.4──国際オープンワークショップ「Intensive Summer Robotic workshop」の様子
☆7──[豊田]ワークショップというかたちが建築の専門教育で大事になると思うのは、アウトプットの質はさておき、こういうデザインプロセスやプログラミング、アウトプットのデバイスなどを融合した開発的プロセスを、とにかくひと通り体験しておくことの重要性があるからだよね。組み合わせは無限。
ほかにも、地域イベントへのコンテンツの提供などもしています。これは東京の狛江市の和泉多摩川商店街でやった「すまいるあーちproject」(2017)です[fig.5]。とにかく予算がないと最初に言われてしまったので、型枠をひとつつくって、それによってアーチを構成し、みんなで絵を描いてもらい、一緒に組み立てる参加型のイベントにしました。参加者が増えれば、その分アーチが伸びていきます。技術としては特に新しいものではありませんが、型枠をつくって段ボール工場で抜いてもらい、非常に安くつくってもらいました。
fig.5──「すまいるあーちproject」フリーランスとしてこうした活動をしてきましたが、縁あって、2018年4月より、竹中工務店からコンピュテーショナルデザイングループを新設するから参加しないか、という話がありました。竹中工務店でも、ロボティクスやデジタルファブリケーションの技術を活かした新しいものづくりをやるということだったので、自分の興味もあって現在に至ります。
生産技術の自動化・効率化ではなく、建設現場にいまだ取り入れられていない技術を建築デザインの新しいプロセスとして提案しようと考えています☆8。私たちは設計本部に属しているので、デザイナー向けの制作ツール、支援ツール開発の協議をさまざまな専門家と始めています☆9。
☆8──[豊田]こういう領域のエキスパートがいろんな企業で増えて、相応の立場と権限とリスペクトを持って、必要な予算とチームを動かせる体制がはやくできてほしい。こういう領域を指向する人が目指せるロールモデルもっと必要。
☆9──[木内]設計側で生産技術までさかのぼって(あるいは生産側で設計まで踏み込んで)考える作業を積み重ねるというのは、あらためて非常に大事なポイントですよね。それぞれの専門で固定的に捉えられている概念や方法を一度バラバラに解きほぐして編みなおすことを促すのが、コンピュテーショナルなデザインやファブリケーション導入の明らかな効果。
先日、会社の研修で「ROB|ARCH 2018」というカンファレンスへ参加しました。会場は母校であるスイス連邦工科大学のITAの校舎です。これは先ほど紹介したSFCでのワークショップのバージョン2のようなものです[fig.6]。たった3日間だったので、私たちがあらかじめセットアップをして、参加者二人一組に1本の丸太を与えています。仕口と、好きなものをつくってもらうというテーマです。丸太のスキャニングは、ロボットにカメラを設置して、ロボットのスキャンポジションを10カ所用意し、点群データを読み取って、Rhinoceros上に読み込み、マージすることで見える化をしています。5分ほどのプロセスで、どういうものをつくろうかと考えることができるようなワークショップをデザインしました。参加者はかなり能力が高く、それぞれ3時間ぐらいで好きな形の仕口をモデリングして、そのパスをつくっています。カットの時間も含めて、1日半くらいで仕上げています☆10。

- fig.6──「ROB|ARCH 2018」でのワークショップの様子
☆10──[角田]コンピュータの話になると、デジタルかアナログかみたいな話になることがいまだに多いわけですが、コンピュータはあくまで道具でしかないし、現在においては、いろいろなものとつながる技術のハブみたいなところがあって、ある程度のことができると、これまで使えなかった道具がどんどん使えるようになって、選択肢が増えていくことが魅力なんだと思う。そうなると、手でやることと機械でやることがものすごくシームレスにつながってくる。そのあたりが如実にわかる事例だと思います。
帰国して、いまは社内でもパラメトリックデザイン、コンピュータ制御加工機材などを使ってみようとしています。エンドエフェクターの先端は社内のロボティクスグループとコラボレーションしながら設計して、どう建築デザインに活かせるかを考えています。エンドエフェクターをつくるには、どういうものをつくるのかというデザインと、機械工学的な要素とを合わせないといけません。
「ペイロードダイアグラム」というものがあります。今回使おうとしているのは6kg可搬なので、それに対してエンドエフェクターからの距離が遠くなればなるほど可搬重量が下がってしまいます[fig.7]。デザインの自由度を持たせるためにロボットから遠いところに手を付けようとすると、あまり重いものが持てなくなるし、近いところだと重いものは持てるけど、振り回しがうまくできないというジレンマが出てきます。ロボットのリーチ範囲などを見ながら、積み上げたときの形を試作するというスタイルで検討しています。
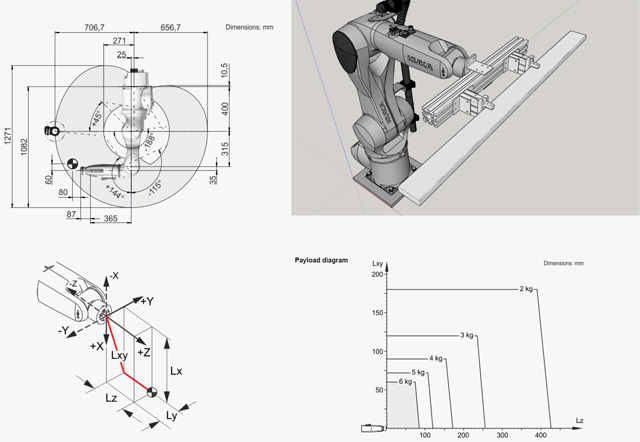
- fig.7──ロボットのエンドエフェクターの距離と可搬重量の関係を示すペイロードダイアグラム(右下)
設計本部の伝統建築グループともコラボレーションしています。社寺建築の幾何学的要素、例えば、反り具合などの調整をデジタルツールで支援したり、パラメトリックな屋根のつくり方を実装してみて、デザインのプロセスに乗るか乗らないかを検討したりしています。従来は何度も線を描いて、専門家以外はわからないようなレベルで検討していたものです。
いま「未来の建物工務店」というウェブサイトをつくっています。建設業でコンピュテーショナルデザインを使うといっても、大きな建設のプロセスのなかではその一部にすぎません。すべてが自動化され、コンピュータが意思決定するのはなかなか難しいので、建設プロセスのなかで少しだけコンピュータを使って支援をしていくという思想のもと、何かわくわくするようなプラットフォームをつくろうと発信しています。


